
April 11, 2021
HOAP-2 is the second in a series of three humanoid robots made by Fujitsu Automation. HOAP stands for Humanoid for Open Architecture Platform. HOAP-2 was released in 2003 and is 48 cm high and weights about 7 kg.
I managed to acquire HOAP-2 SN:0010 from Yahoo Japan Auctions. It came with the power cord and USB cord but no software or power supply. It took me a week or so to track down the English user’s manual using the wayback machine.
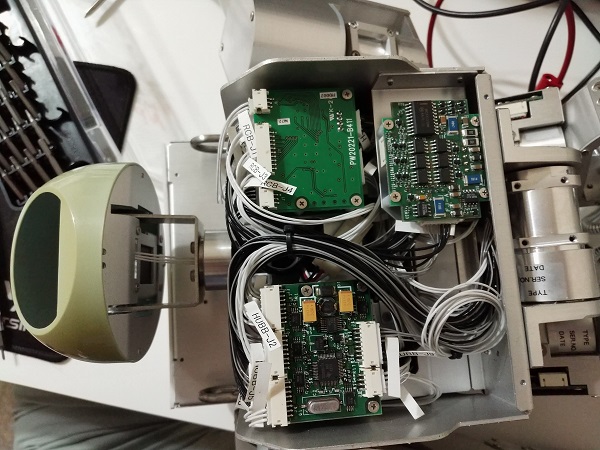
The power cable that came with the robot is a beefy almost XLR like cable. Because I didn’t have an adapter handy (for the weird 3 pin format), I managed to power up the robot through the battery port in the robot’s backpack. I am assuming the NiCad battery was not included for safety reasons (or was lost by the owner). Luckily, my HOAP-2 includes the wireless add-on package. This includes an additional computer shown below (powered by an AMD Geode processor).


The two things I need to get this robot walking again are the software (which I can hopefully dump from the CF card) and the startup jig. Like many humanoids, HOAP-2 cannot remember the zero positions of it’s joints, so you must zero every joint using a special jig. The user manual doesn’t give exact measurements for this jig, but does show some photos.
May 17, 2021
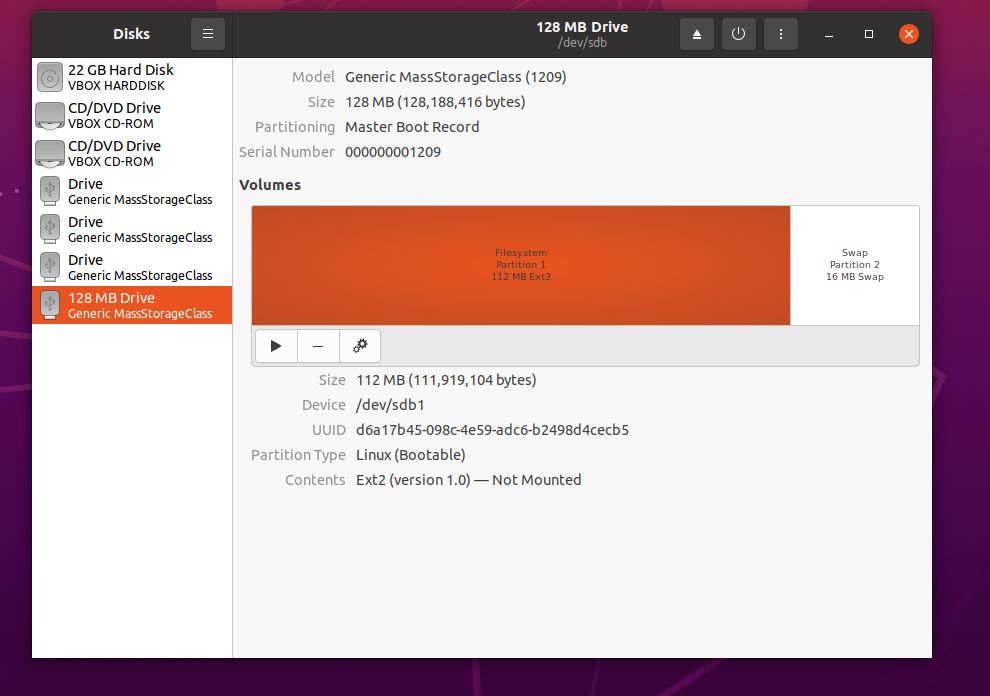
The only progress I made from my last post is on the software front. Unfortunately, I haven’t been able to get ahold of a dump of either software CD that came with HOAP-2. The good news is that the data on the compact flash card contained in the wireless add-on computer was not corrupted. Using Ubuntu 20.04, I was able to duplicate the disc image for safe keeping.
Download link is https://archive.org/details/hoap-2-cf.tar
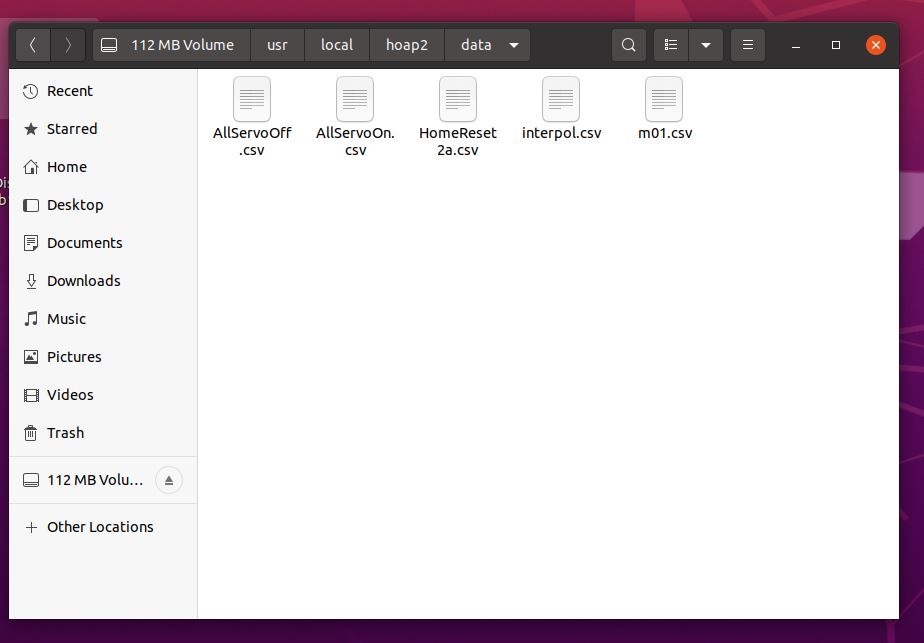
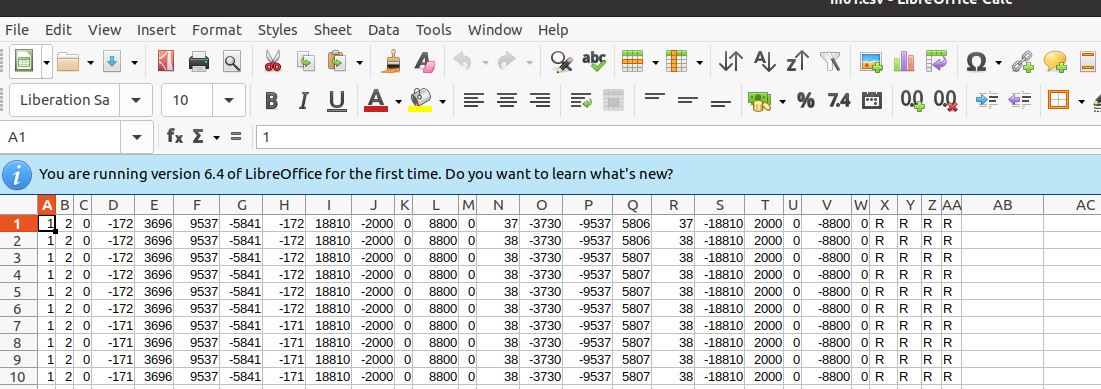
The picture above shows the included ZMP walking example. Strangely it is stored as a CSV. This makes me pretty certain that it uses no active stabilization. At the size of HOAP-2, it’s probably stable enough using an entirely preplanned motion. I included this example file in the Internet Archive link above. I will update this article once I have an idea of what each column of data represents.